- Обучение
- Поступление в ЗФТШ
- О ЗФТШ
- Учителям
- Лекторий
-
Курсы
- Заочное отделение
- Очное отделение
- Факультативы

1. Основные определения
Удивительно, но с векторными величинами разной природы (перемещением, скоростью, силой, импульсом и др.) можно работать в значительной мере единообразно - как с геометрическими объектами - геометрическими векторами, или просто векторами, хотя есть и нюансы (см. ниже).
Вектор представляет собой направленный отрезок прямой, для которого определены правила (законы) сложения с другими векторами, правило вычитания векторов, правило умножения вектора на число, скалярное произведение двух векторов и некоторые другие операции.
Стрелка компаса - не вектор, т. к. для неё нет таких операций.
Мы будем рассматривать векторы на плоскости и в соответствии со сложившейся традицией обозначать их латинскими буквами со стрелками наверху, например: `vec v`, `vec F`, `vec a`, `vec b` и т. п. Часто в целях экономии используют упрощённое обозначение - букву с чертой, например, `bar v` или `bar F`.
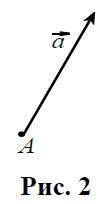
Одну из граничных точек вектора называют его началом, а другую - концом. Направление вектора задаётся от начала к концу, причём на чертеже конец вектора отмечают стрелкой. Начало вектора называют также точкой его приложения. Если точка `A` является началом вектора `vec a`, то мы будем говорить, что вектор `vec a` приложен в точке `A` (рис. 2).
Число, выражающее длину направленного отрезка, называют модулем вектора и обозначают той же буквой, что и сам вектор, но без стрелки наверху, например: модулем вектора `vec v` является число `v`. Часто для обозначения модуля вектора прибегают к помощи знака абсолютной величины и пишут, например, `|vec v|` или `|vec F|`.
Вектор называется нулевым, если его начало и конец совпадают. Нулевой вектор не имеет определённого направления и его длина (модуль) равна нулю.
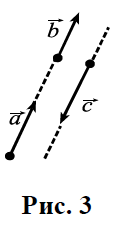
Векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых. Так, например, на рис. 3 векторы `vec a`, `vec b` и `vec c` коллинеарны.
Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и одинаковое направление.
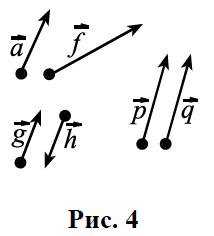
На рис. 4 слева изображены неравные векторы `vec a` и `vec f`, `vec g` и `vec h`, а справа - равные векторы `vec p` и `vec q`. Точка приложения геометрического вектора `vec a` может быть выбрана произвольно. Мы не различаем двух равных векторов, имеющих разные точки приложения и получающихся один из другого параллельным переносом. В соответствии с этим векторы, изучаемые в геометрии, называют свободными (они определены с точностью до точки приложения).
В физике точка приложения вектора иногда имеет принципиальное значение. Достаточно вспомнить рычаг: две равные по модулю силы, направленные в одну и ту же сторону, производят на рычаг разное действие, если плечи сил не равны друг другу. И всё же сами силы равны друг другу! Бывают и случаи, когда вектору трудно приписать конкретную точку приложения. Например, если одна система отсчёта движется относительно другой со скоростью `vec v`, то какой точке приписать эту скорость? Всем точкам движущейся системы!
2. Сложение двух векторов.
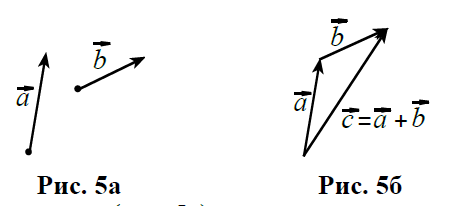
Пусть даны два произвольных вектора `vec a` и `vec b` (рис. 5а).
Для нахождения их суммы нужно перенести вектор `vec b` параллельно самому себе так, чтобы его начало совпало с концом вектора `vec a`. Тогда вектор, проведённый из начала вектора `vec a` в конец перенесённого вектора `vec b`, и будет являться суммой `vec a` и `vec b`. На рис. 5б - это вектор `vec c`.
Описанное правило есть просто определение суммы векторов. Как и в случае с числами, сумма векторов не зависит от порядка слагаемых, и поэтому можно записать
Приведённое выше правило геометрического сложения векторов называется правилом треугольника.
Сумма векторов может быть найдена и по правилу параллелограмма. В этом случае параллельным переносом нужно совместить начала векторов `vec a` и `vec b` и построить на них, как на сторонах, параллелограмм. Тогда сумма `vec a` и `vec b` будет представлять собой диагональ этого параллелограмма, конкретно - суммой `vec a` и `vec b` будет вектор, начало которого совпадает с общим началом векторов `vec a` и `vec b` конец расположен в противоположной вершине параллелограмма, а длина равна длине указанной диагонали (рис. 5в).

Оба способа сложения дают идентичный результат и одинаково часто применяются на практике. Когда речь идёт о нахождении суммы трёх и более векторов, часто последовательно используют правило треугольника. Поясним сказанное.
3. Сложение трёх и более векторов.
Пусть нужно сложить три вектора `vec a`, `vec b` и `vec d` (рис. 6).
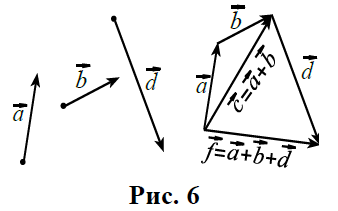
Для этого по правилу треугольника сначала находится сумма любых двух векторов, например `vec a` и `vec b`, потом полученный вектор `vec c = vec a + vec b` по тому же правилу складывается с третьим вектором `vec d`. Тогда полученный вектор `vec f = vec c + vec d` и будет представлять собой сумму трёх векторов `vec a`, `vec b` и `vec d`: `vec f = vec a + vec b + vec d`. Как и в случае с двумя векторами, порядок слагаемых не влияет на конечный результат.
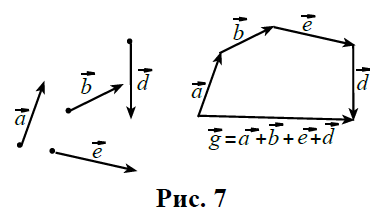
Чтобы упростить процесс сложения трёх и более векторов, обычно не находят промежуточные суммы типа `vec c = vec a + vec b`, а применяют правило многоугольника: параллельными переносами из конца первого вектора откладывают второй, из конца второго - откладывают третий, из конца третьего - четвёртый и т. д.
Так, на рис. 7 вектор `vec g` представляет собой сумму векторов `vec a`, `vec b`, `vec d`, `vec e`, найденную по правилу многоугольника: `vec g = vec a + vec b + vec d + vec e`.
Не всякая векторная сумма может иметь физический смысл. Не всякие величины вообще имеет смысл складывать. Так, например, бессмысленно говорить, что, если у меня температура `36,6^@` и у вас тоже `36,6^@`, то вместе у нас температура `73,2^@`, хотя складывать температуры (числа) никто не запрещает. Всё же чаще всего сумма температур представляет собой никому не нужную величину; она редко входит в какие-либо уравнения (входит почти случайно).
Иное дело – с массой. Если система состоит из тел с массами `m_1`, `m_2`, `m_3` и т. д., то масса всей системы равна `m = m_1 + m_2 + m_3 + ` и т. д. (Если на лифте написано, что максимальный груз, перевозимый лифтом, равен `500` кг, то перед входом в лифт нужно убедиться, что сумма масс вносимых в лифт грузов не превышает `500` кг.) Говорят, что масса – есть аддитивная величина (от английского слова add – добавлять, прибавлять, складывать). А вот температура – не аддитивная величина.
Сила есть аддитивная векторная величина. Если к телу в точке (или к системе тел в разных точках!) приложены силы `vec(F_1)`, `vec(F_2)`, `vec(F_3)` и т. д., то сумма векторов сил `vec(F_1) + vec(F_2) + vec(F_3) + ...` есть осмысленная и даже очень нужная величина. Например, в условиях равновесия тела сумма всех приложенных к нему сил `vec(F_1) + vec(F_2) + vec(F_3) + ... = 0`, даже если силы приложены в разных точках тела. Причём это относится не только к твёрдым телам. Если нитка подвешена за два конца к двум гвоздям, а в промежутке перекинута еще через какие-нибудь гвозди, то сначала нужно найти силы со стороны каждого из гвоздей и силу со стороны Земли (силу тяжести) `vec F_1`, `vec(F_2)`, `vec(F_3)`, `…`; при этом говорят, что к нитке приложена сумма сил `vec(F_1) + vec(F_2) + vec(F_3) + ...`; в условиях равновесия эта сумма будет равна нулю.
Не так со скоростями. Если система состоит из двух частиц, имеющих в некоторый момент времени скорости `vec(v_1)` и `vec(v_2)`, то это не означает, что в этот момент вся система обладает скоростью равной векторной сумме `vec(v_1) + vec(v_2)`. Никто не запрещает складывать векторы скорости разных частиц; но с точки зрения физики вектор `vec(v_1) + vec(v_2)` ничему приписать нельзя. В этом смысле скорость - не аддитивная величина. Суммой скоростей (векторной суммой) интересуются, когда одно движение накладывается на другое (например, Земля вращается вокруг Солнца, но вместе с Солнцем движется вокруг центра Галактики). А вот сумма скоростей отдельных частиц системы (например, сумма скоростей звезд в Галактике) физического интереса не представляет.
Родственная скорости величина, с которой вы еще не раз встретитесь в курсе физики, импульс материальной точки, равный произведению массы на скорость, `vec p = m vec v` снова - величина аддитивная.
В последнем равенстве мы встречаемся с умножением вектора на скаляр. Поясним эту процедуру.
4. Умножение вектора на скаляр.
Произведением вектора `vec a` на число `k` называют новый вектор `vec b = k vec a`, коллинеарный вектору `vec a`, направленный в ту же сторону, что и вектор `vec a`, если `k > 0`, и в противоположную сторону, если `k < 0`, а модуль `b` равен
где `|k|` - абсолютная величина числа `k`.
Если два вектора коллинеарны, то они отличаются только скалярным множителем. Наоборот, если два вектора отличаются только скалярным множителем, не равным нулю, то они коллинеарны.
В случае, когда `k = 0` или `vec a = 0`, произведение `k vec a` представляет собой нулевой вектор, направление которого не определено.
Если `k = 1`, то согласно (2) `vec b = vec a` и векторы `vec a` и `vec b` равны (рис. 8а).

При `k = - 1` получим `vec b = - vec a`. Вектор `- vec a` имеет модуль, равный модулю вектора `vec a`, но направлен в противоположную сторону (рис. 8б).
Два вектора, противоположно направленные и имеющие равные длины, называются противоположными.
Импульс тела `vec p = m vec v` коллинеарен вектору скорости и направлен с ней в одну сторону, т. к. массы всех тел положительны. Чуть ранее говорилось об аддитивности импульса. Если система состоит из материальных точек с массами `m_1`, `m_2`, `m_3`, `...`, которые в некоторый момент времени имели скорости `vec(v_1)`, `vec(v_2)`, `vec(v_3)`, `…`, т. е. имели импульсы `vec(p_1) = m_1 vec(v_1)`, `vec(p_2) = m_2 vec(v_2)`, `vec(p_3) = m_3 vec(v_3)`, `…`, то вся система в этот момент обладает импульсом
`vec p = vec(p_1) + vec(p_2) + vec(p_3) + ... = m_1 vec(v_1) + m_2 vec(v_2) + m_3 vec(v_3) + ...`.
При этом каждое из слагаемых здесь должно быть найдено по правилу умножения вектора (скорости данной частицы) на скаляр (её массу), а затем все эти векторы должны быть сложены, например, по правилу многоугольника.
Вычесть из вектора `vec a` вектор `vec b` означает прибавить к вектору `vec a` вектор `- vec b`:
`vec a - vec b = vec a + (- vec b)`

