- Обучение
- Поступление в ЗФТШ
- О ЗФТШ
- Учителям
- Лекторий
-
Курсы
- Заочное отделение
- Очное отделение
- Факультативы

В рамках классической механики скорость и ускорение тела преобразуются по определённым правилам при переходе от одной системы отсчёта к другой.
Пусть имеются две произвольные системы отсчёта `K` и `K^'` (рис. 6). Известны скорость `vecv^'` и ускорение `veca^'` тела (точки `A`) в `K^'` - системе.
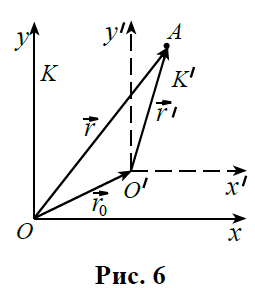
Рассмотрим случай, когда `K^'`- система движется поступательно по отношению к `K` - системе, и определим значения скорости `vecv` и ускорения `veca` тела в `K`-системе.
Если за малый промежуток времени `Deltat` тело (точка `A`) переместилось относительно `K^'` - системы на величинy `Deltavecr^'`, а `K^'` - система переместилась относительно `K` - системы на `Deltavecr_0`, то из правила векторного сложения следует, что перемещение `Deltavecr` тела относительно `K` - системы будет равно `Deltavecr=Deltavecr_0+Deltavecr^'`. Разделив обе части этого равенства на $$ ∆t$$ и обозначив через скорость `K^'` - системы относительно `K` - системы, получим:
`vec v =vec v_o +vec v^'` (4)
Рассуждая аналогично,найдем формулу преобразования ускорения :
`vec a =vec a_o + vec a^'` (5)
Из формулы (5) вытекает важное следствие: при ускорения и `vec a^'` равны. Иными словами, если система отсчёта `K^'` движется поступательно без ускорения относительно системы отсчёта `K`, то ускорения тела в обеих системах отсчёта будут одинаковы.
Переход из одной системы отсчёта в другую довольно часто применяется на практике и порой существенно облегчает решение некоторых физических задач, поэтому к данному приёму желательно привыкнуть и научиться умело его использовать.
Часто встречаются задачи, в которых два тела движутся независимо друг от друга в некоторой системе отсчёта, и требуется определить какие-либо величины (перемещение, скорость), характеризующие движение одного тела относительно другого. В таких случаях, как правило, удобно перейти в систему отсчёта, связанную с тем телом, относительно которого рассматривается движение другого тела, и применить полученные выше формулы преобразований. Относительные перемещение и скорость двух тел определяются векторной разностью их перемещений и скоростей, заданных по отношению к одной и той же (чаще всего – неподвижной) системе отсчёта. Рассмотрим следующий пример.
Два корабля движутся с постоянными скоростями $$ {\overrightarrow{v}}_{1}$$ и $$ {\overrightarrow{v}}_{2}$$ под углом $$ \alpha $$ друг к другу (рис. 7). Найти скорость первого корабля относительно второго.

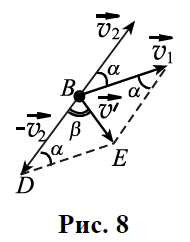
Перейдём в систему отсчёта, связанную со вторым кораблём, движущимся со скоростью $$ {\overrightarrow{v}}_{2}$$. В этой системе отсчёта относительная скорость `vec v^'` первого корабля согласно (4) будет равна `vec v^'= vec v_1 -vec v_2`. Вектор $$ \overrightarrow{v}\text{'}$$ определим геометрически, используя правило построения векторной разности (рис. 8). Из треугольника `BDE` с помощью теоремы косинусов найдём модуль искомого вектора:
`v^' =sqrt(v_1^2 +v_2^2-2v_1v_2cosalpha)`.
Направление вектора `vec v^'` зададим, например, углом `beta` (рис. 8), который определим из `DeltaBDE` по теореме синусов:
`(v_1)/(sinbeta)=(v^')/(sinalpha)`.
Отсюда
`sinbeta=(v_1)/(v^')sinalpha=(v_1 sinalpha)/(sqrt(v_1^2 +v_2^2-2v_1v_2cosalpha))`.